Budget Extensions - 30lb Combat Robot
In my second year in the UIUC iRobotics club, we set out to design a robot with the goal of having a huge spinning weapon on top. We designed a 30lb "Featherweight" class combat robot with a large 20" overhead blade. As the chassis lead on the team, I led discussions involving overall robot-architechture questions and designed and manufactured much of the robot.

CAD rendering of the robot
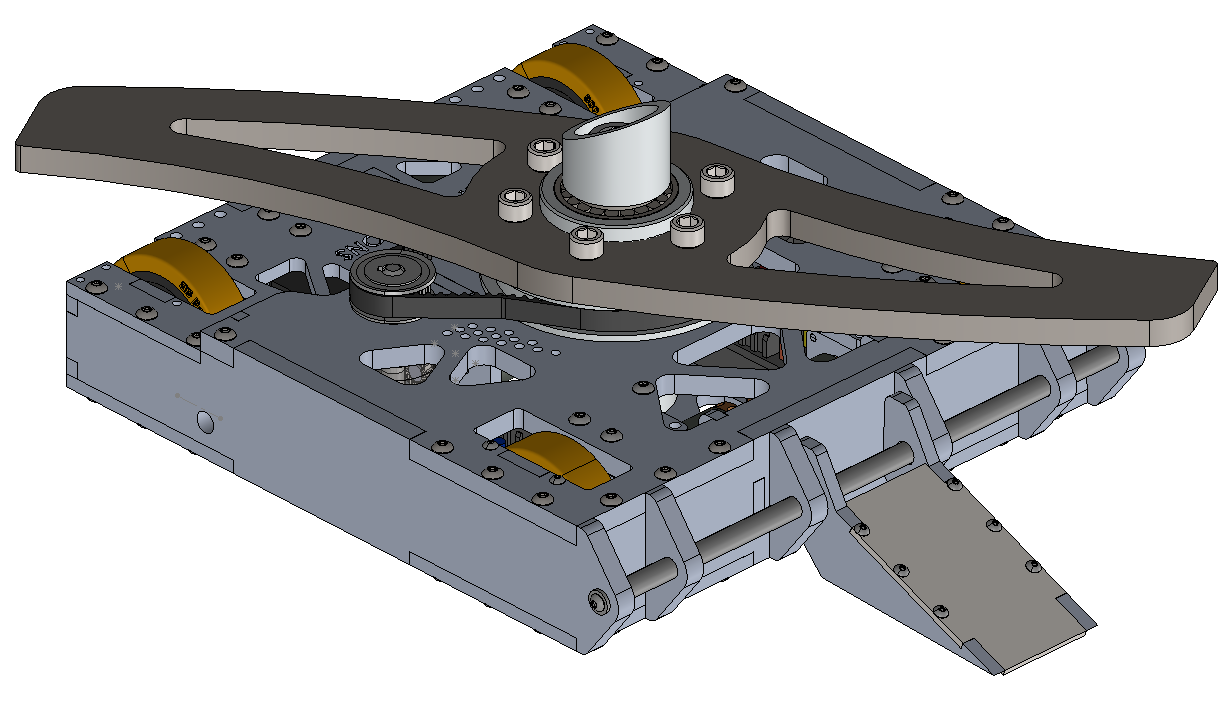
CAD model of the robot
A slightly terrifying spin-up test of our weapon
Image Gallery
Design and Analysis
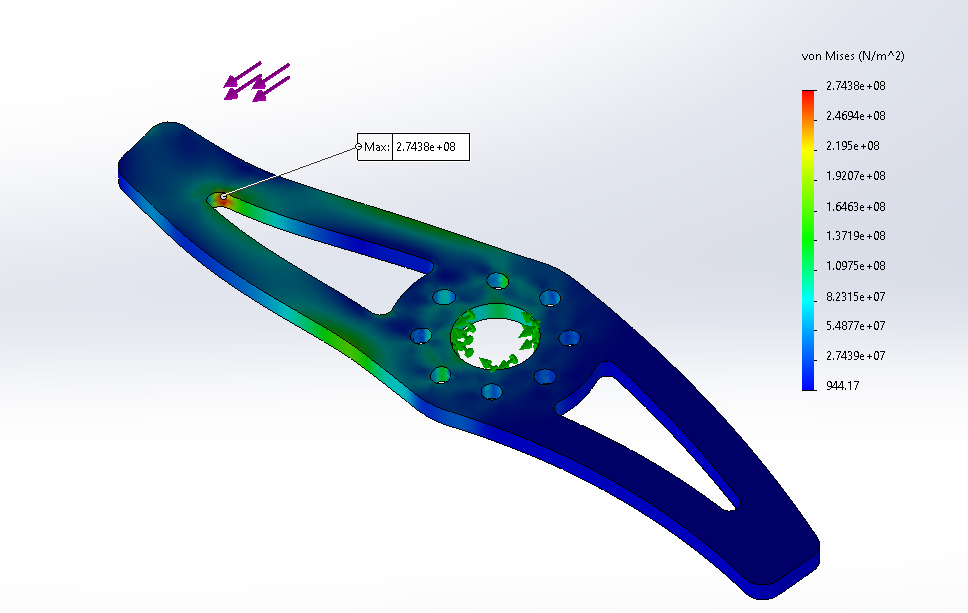
Preliminary static structural analysis of weapon design to identify potential stress risers
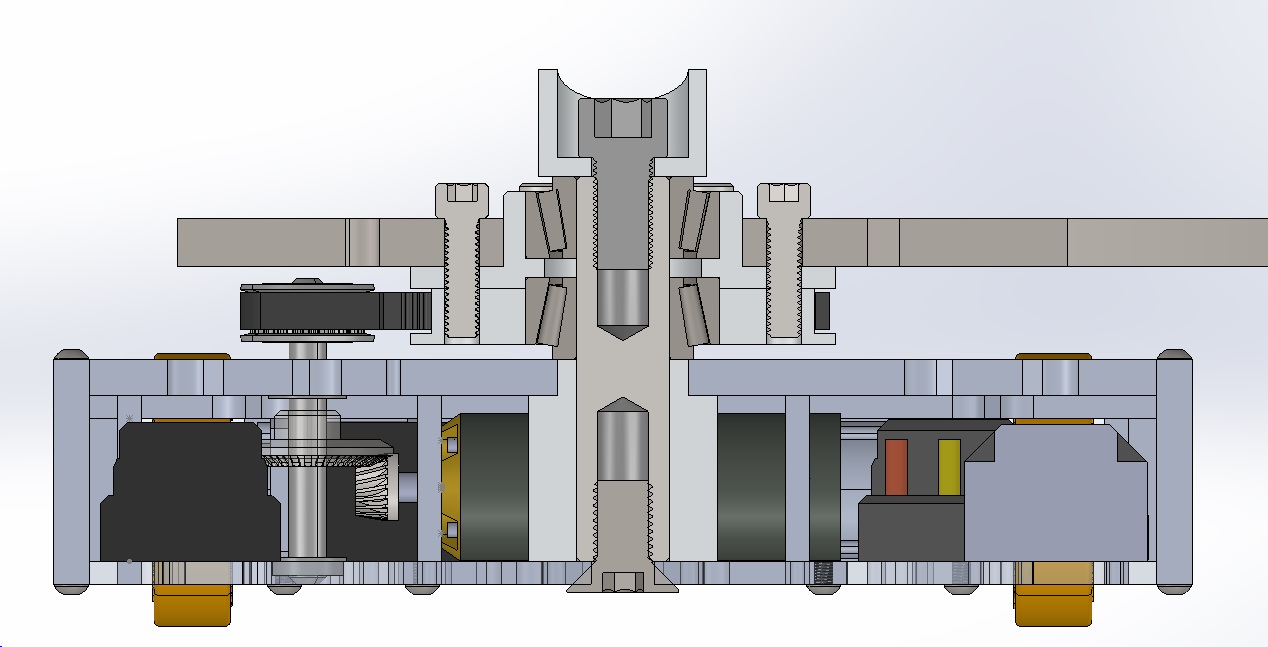
Weapon-Pulley-Bearing-Shaft stack-up cross section which I designed
CAD model of the robot
Manufacturing
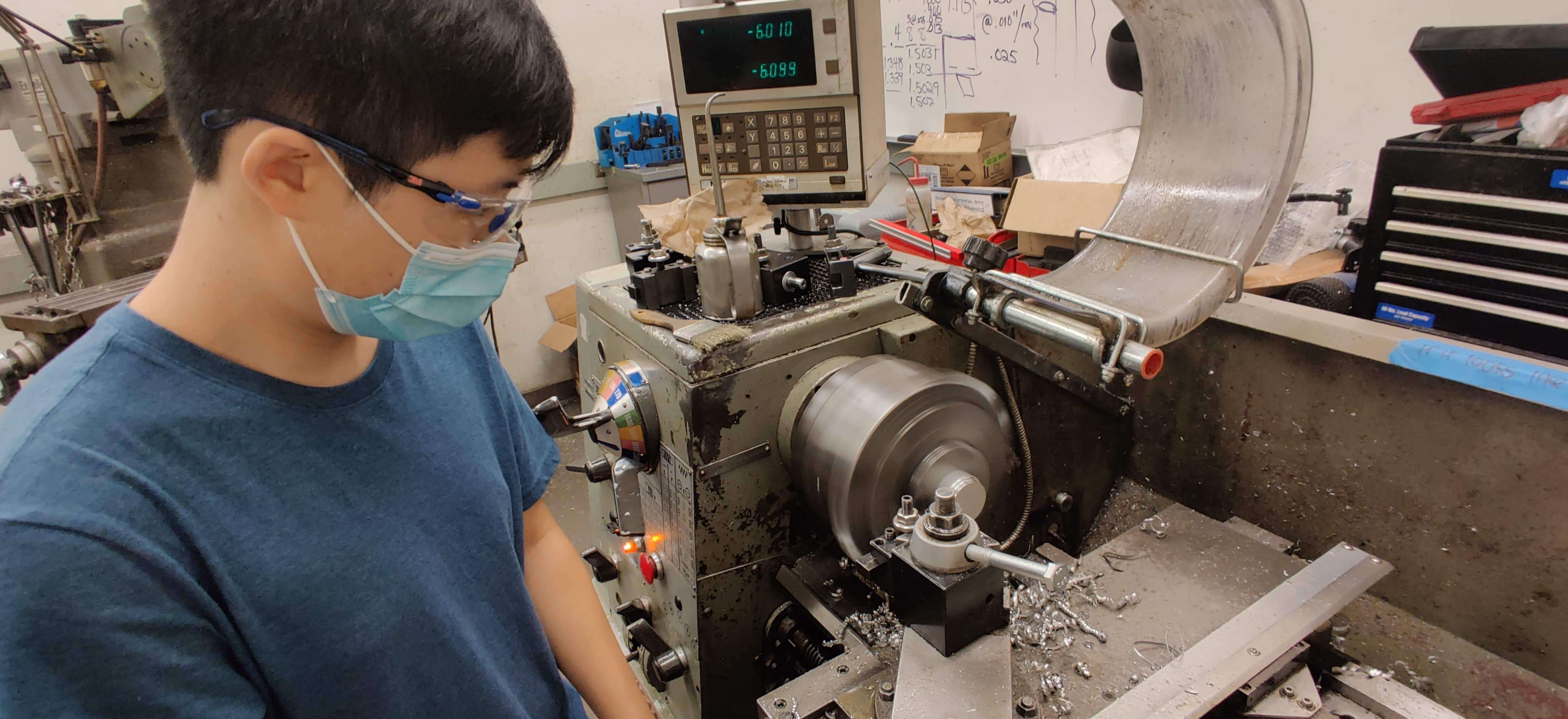
Me turning the wheels of a lathe to manufacture a supporting mount for our weapon shaft.
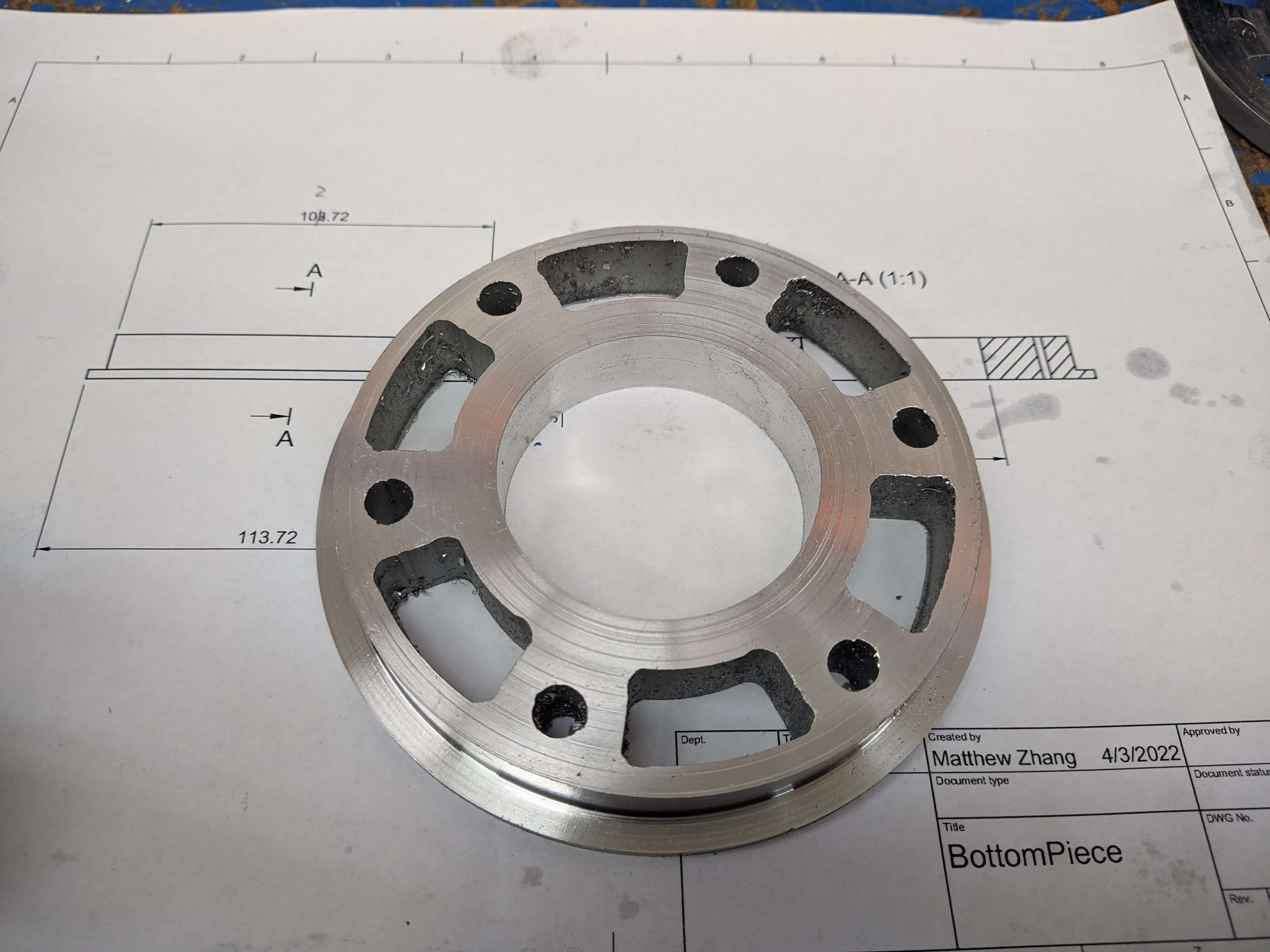
Timing belt pulley that I manufactured via a initial waterjetting process followed by turning and boring using the lathe.
Construction
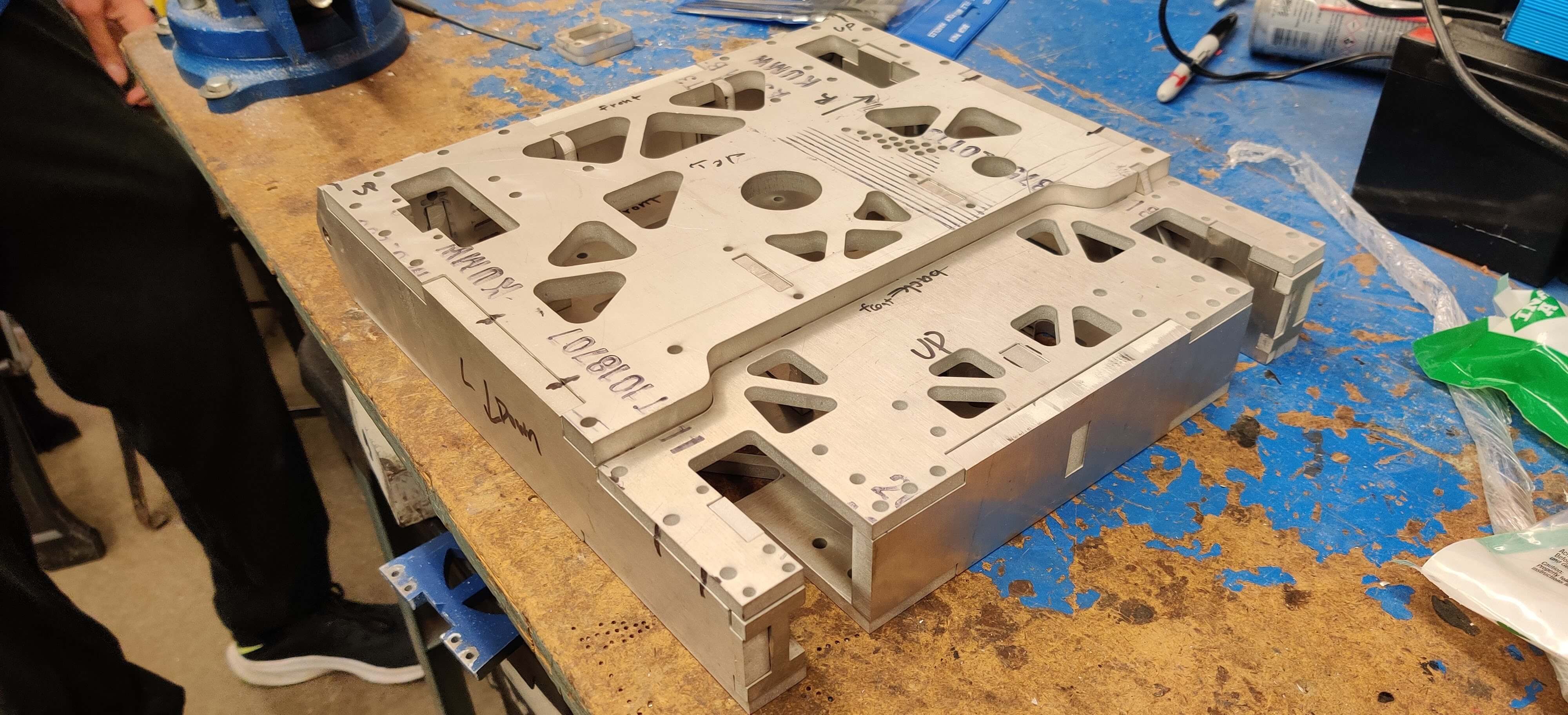
The plates of the robot assembled for fit-testing after waterjetting
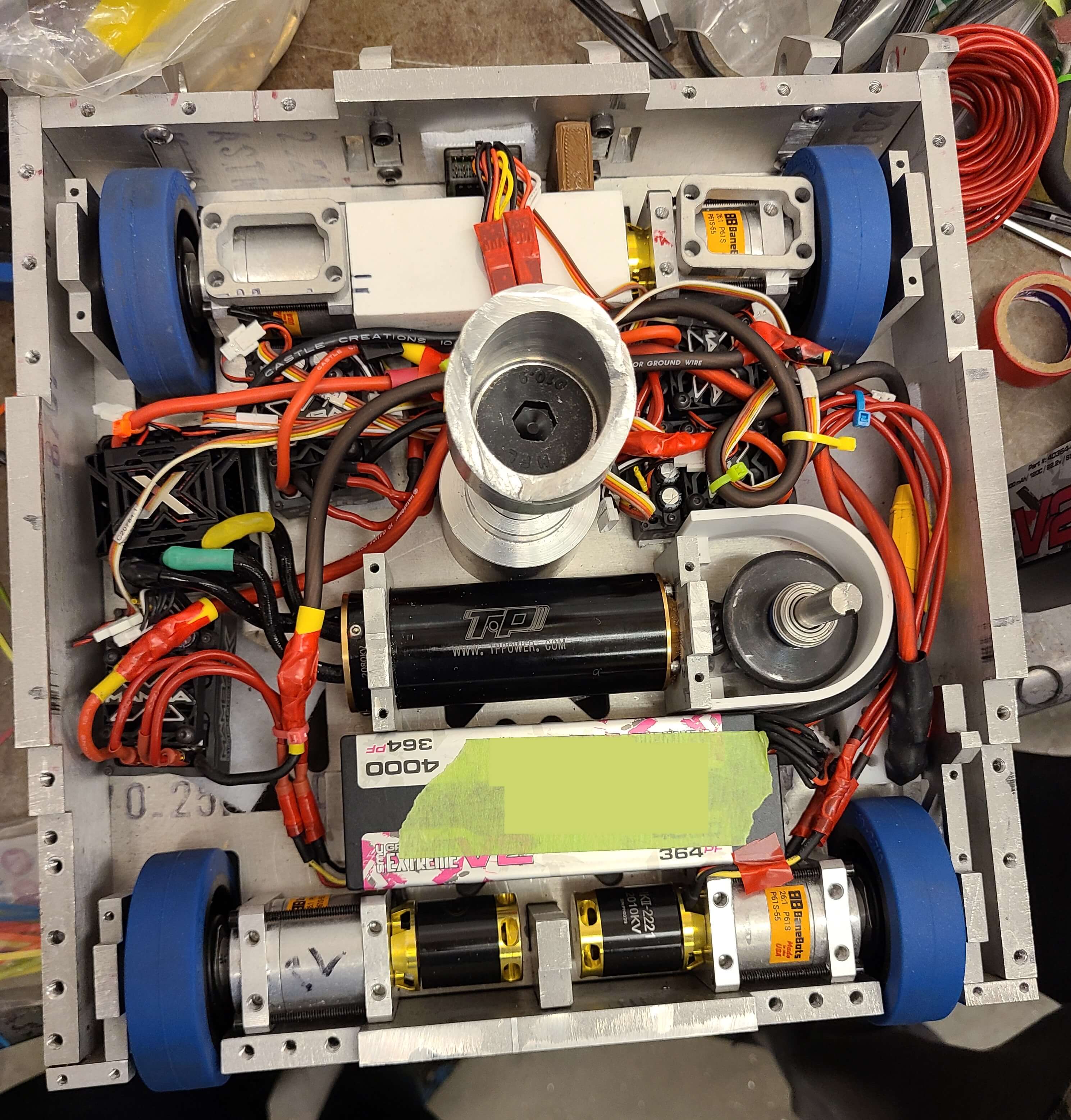
Assembled internals with electrical components and wiring harnesses
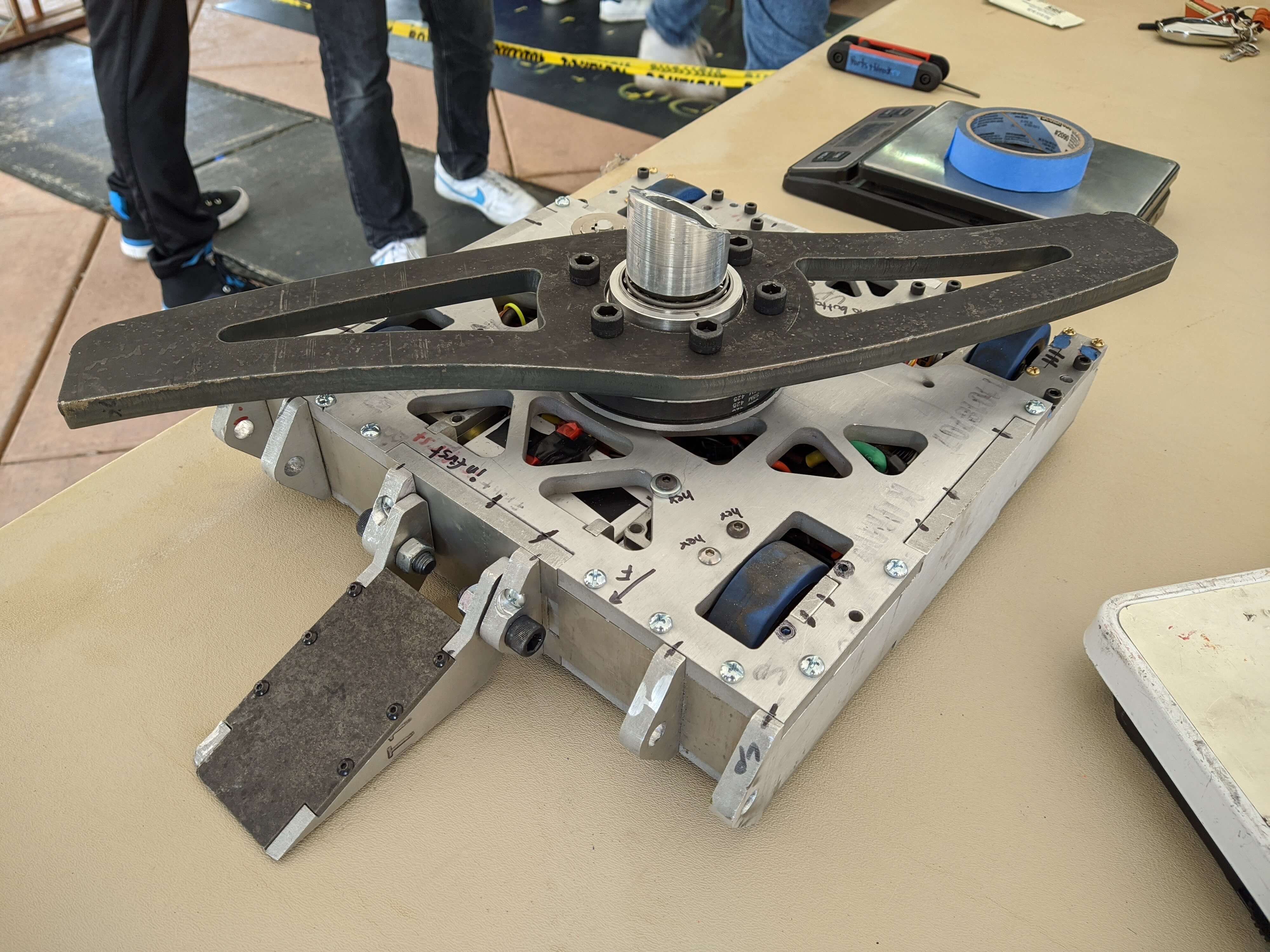
The full robot assembled
Fights
Our first match where we destroyed the opposing robot's weapon
A vicious second fight ending in an unfortunate battery fire