Null Pointer Exception - 3lb Combat Robot
After spending some time in the iRobotics RSO building combat robots, I wanted to join the world of hobbyist combat robotics with my own entry. I designed a 3lb "Beetleweight" class combat robot with a high-speed horizontally spinning "undercutter" blade, designed to dish out high-kinetic energy impacts to other robots and destroy their frame and wheels.
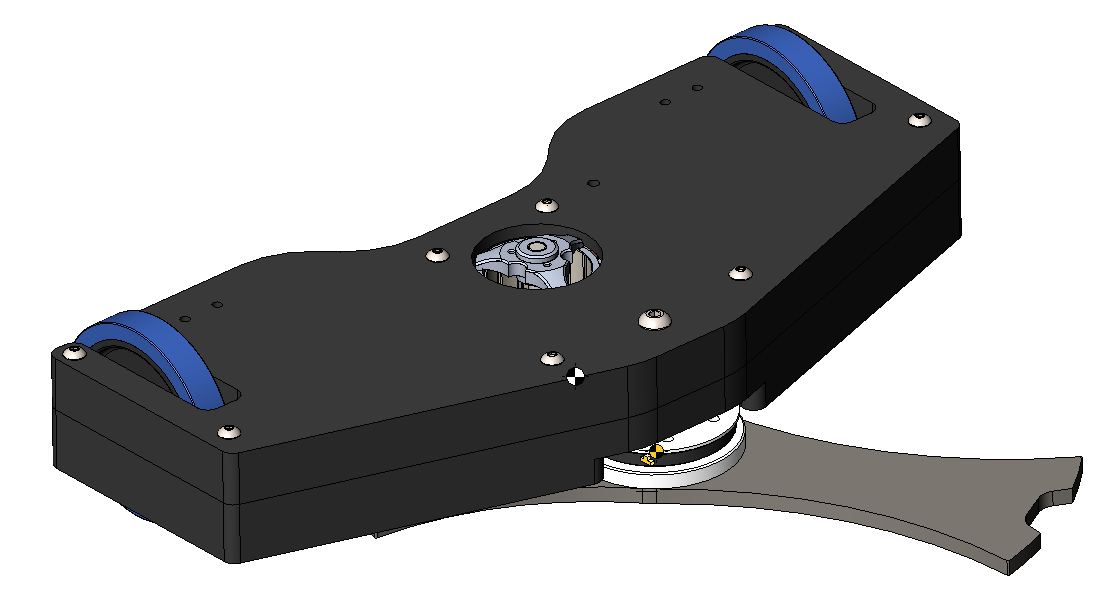
CAD model of the robot
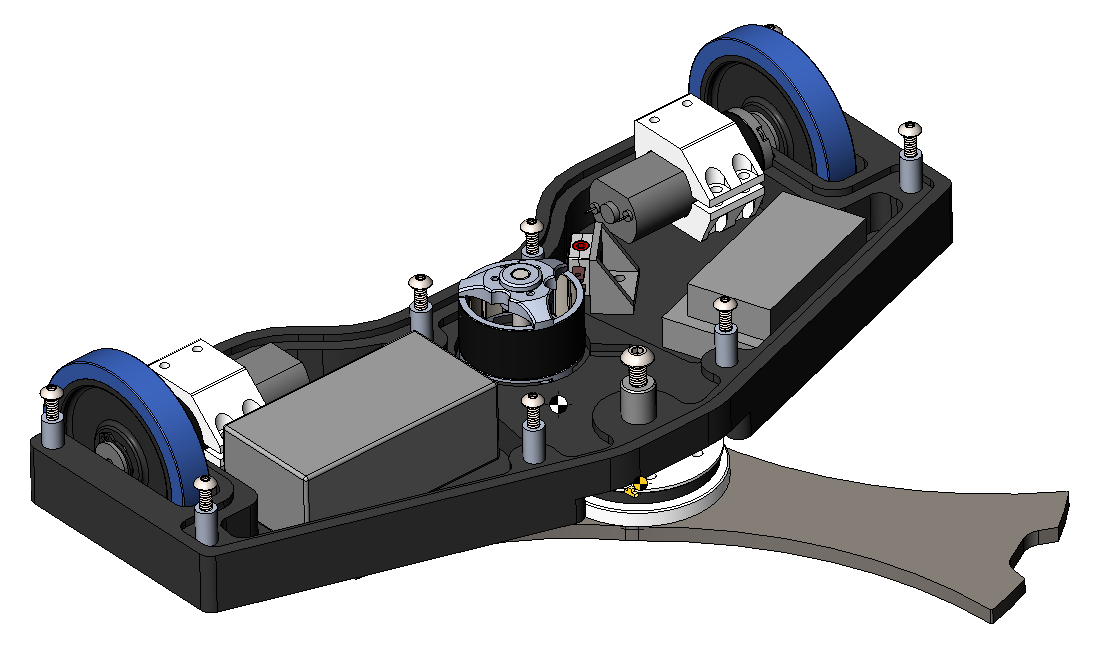
CAD model with top plate removed to reveal internals
A featured match against a tough opponent
Image Gallery
Manufacturing
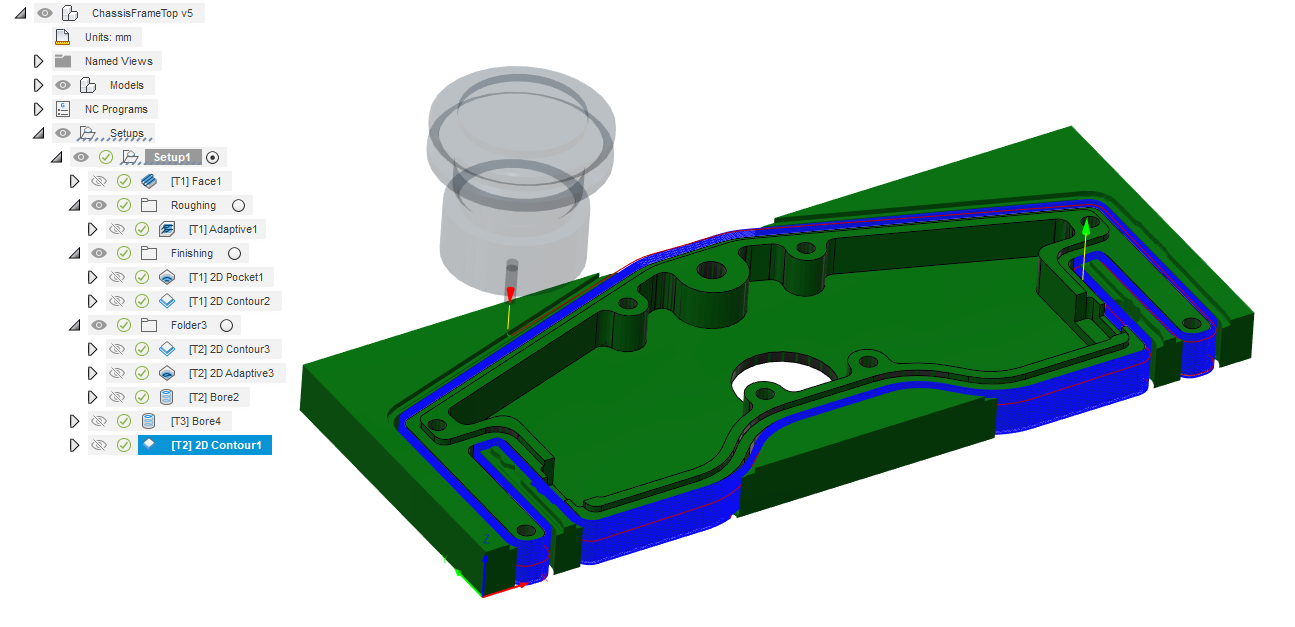
CAM program developed in Fusion360 for chassis machining

Top half of chassis mid-machining
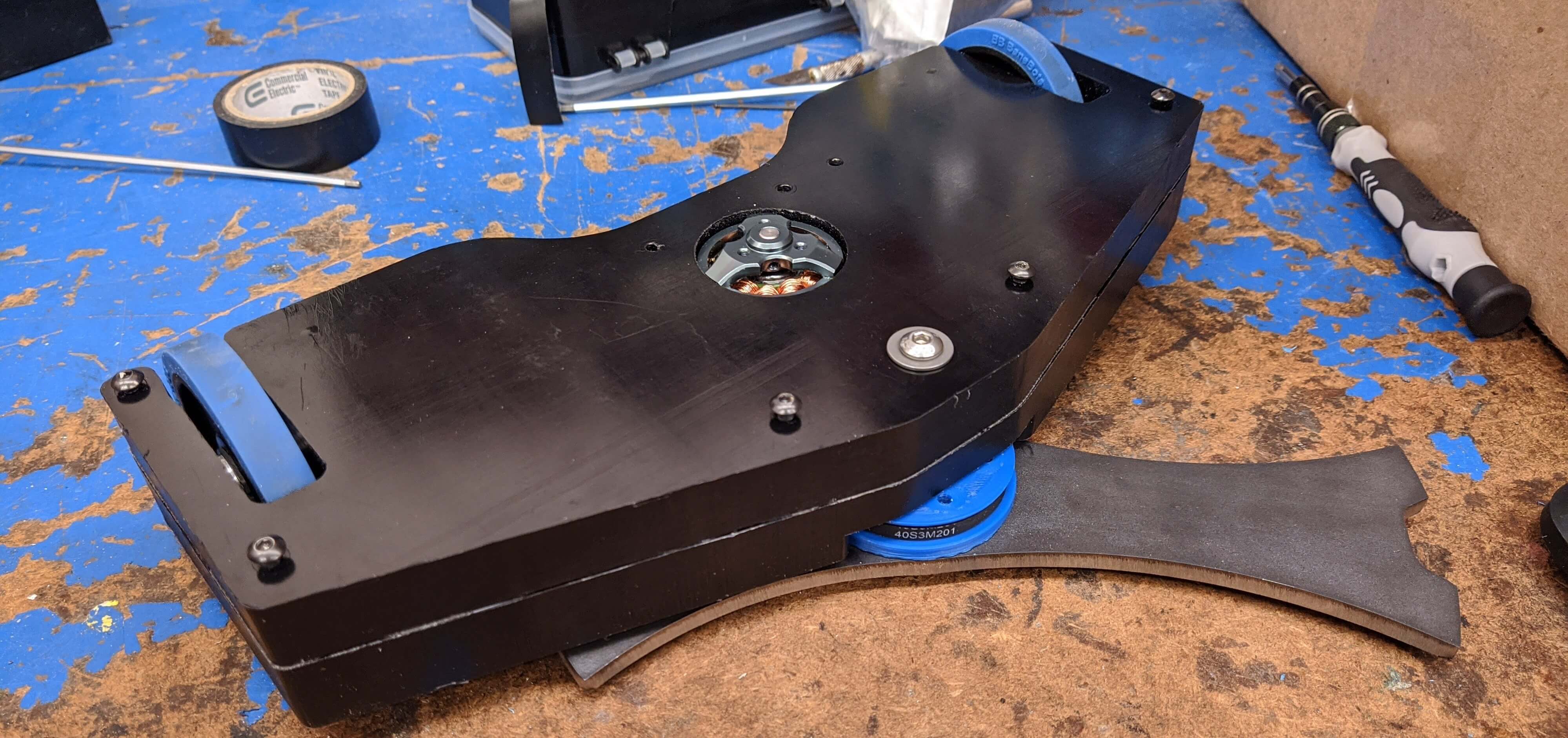
Construction

Both halves of the chassis post-machining with standoffs inserted
Both halves of the chassis post-machining with standoffs inserted
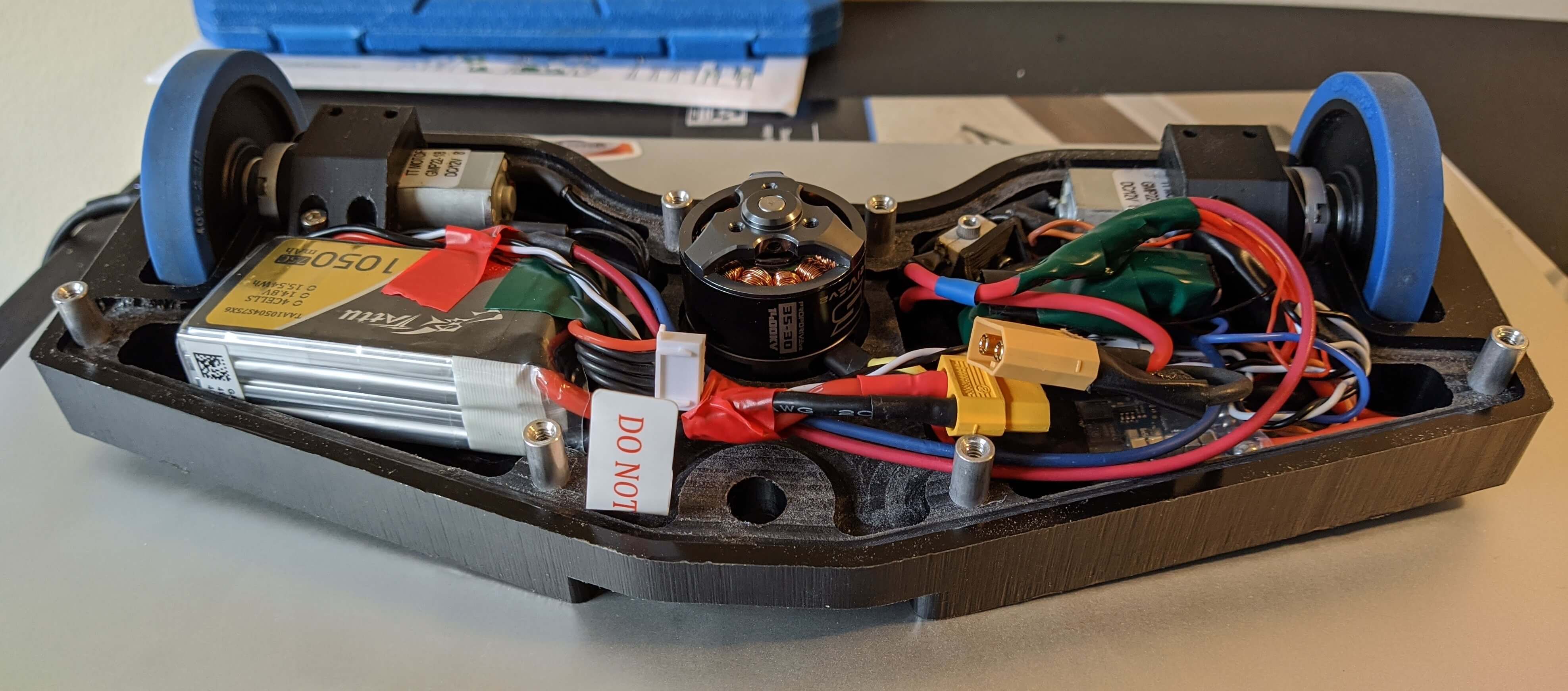
The full robot assembled for the first time!
Post-Fights

The robot after a long day with a 3rd place trophy! And a very gouged, but still usable chassis