Quadruped Robot Dog
Over the summer of 2021, I was inspired by quadruped robots that were built by other hobbyists and professional robots such as Boston Dynamics' Spot robot, and decided to create my own from scratch using 3D printed components, RC servos, and an ARM-32 microcontroller. Unfortunately I had to put this project on hiatus because I became very busy with my work on the Illini Solar Car team in order to prep for our summer course, and the course that I tought.
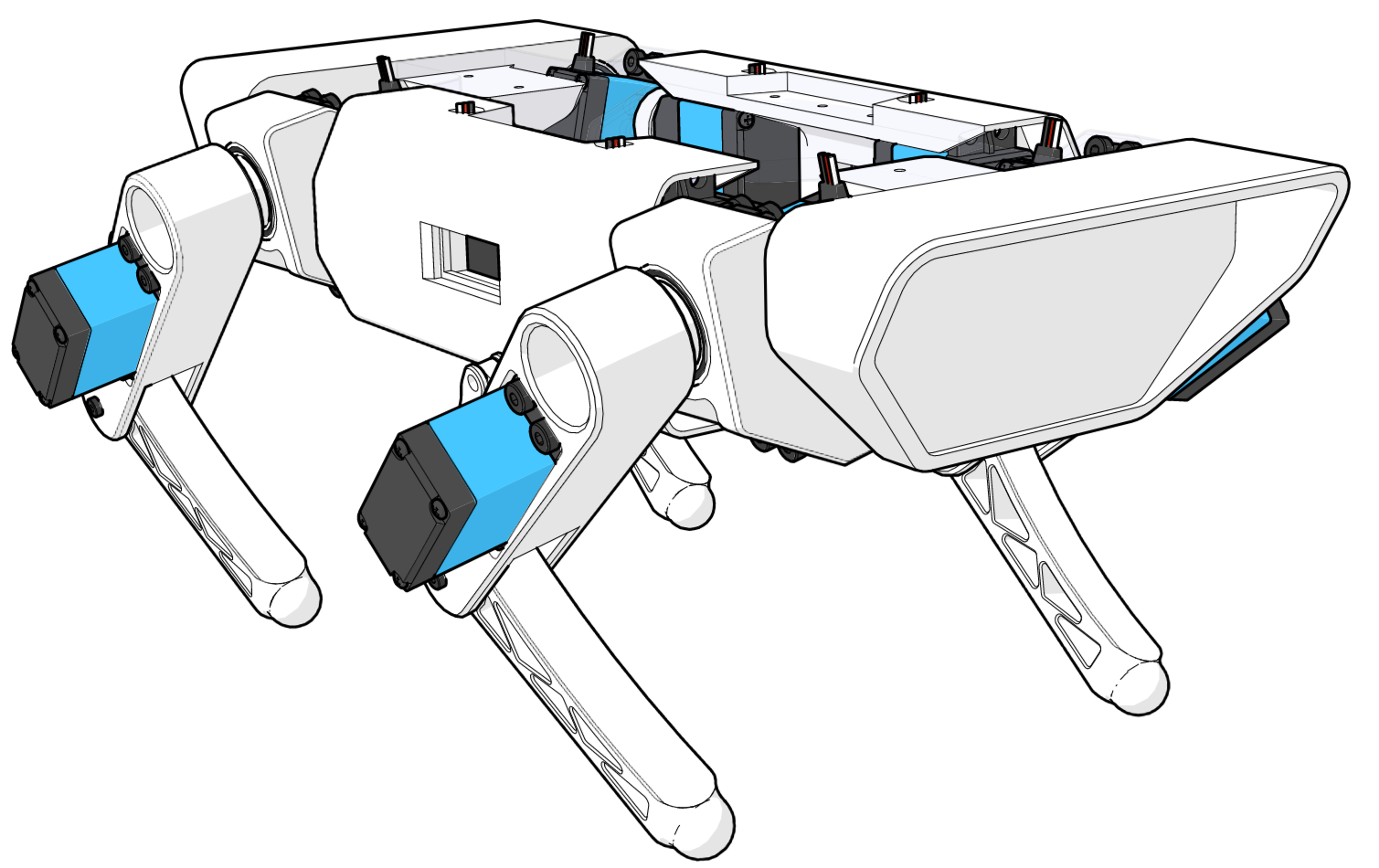
CAD model of the robot
The robot showing off its inverse kinematic control by moving its feet in circles
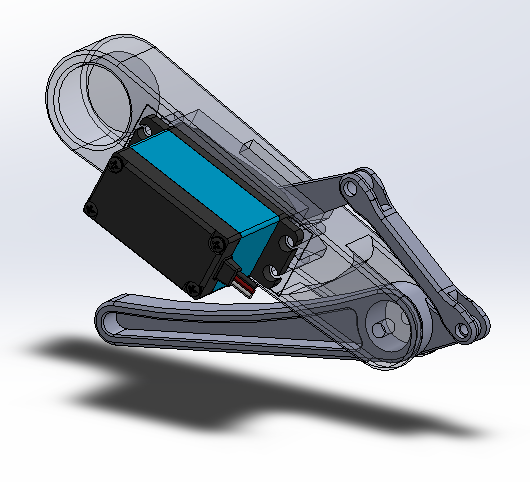
Early concept leg design. Upper leg joint transparent to show internals and four bar linkage