ME370 Inverted Walker
As part of the ME370: Mechanical Design course at UIUC, we had to design an "inverted walker" which utilized a 1 degree of freedom linkage to move along a rope which spanned a creek located near the engineering buildings.
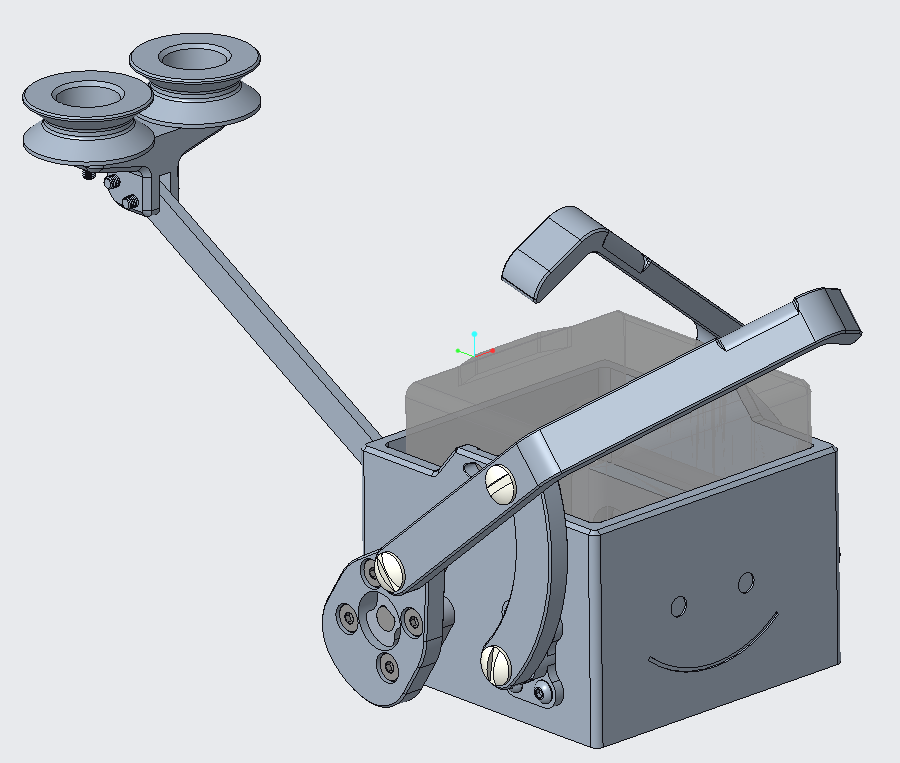
CAD model of the robot

Our robot walking on the rope
Assembled walker running in mid-air
Image Gallery
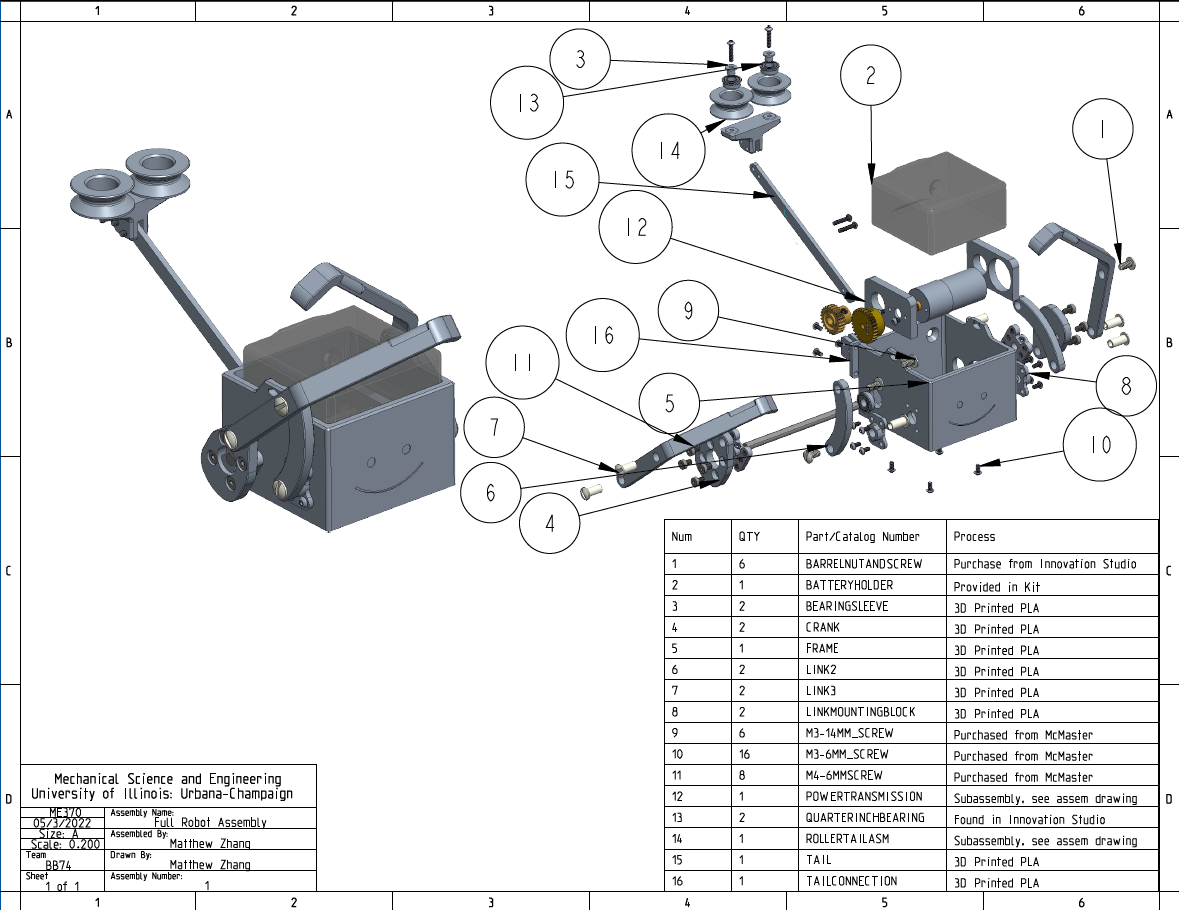
Exploded assembly drawing of the walker
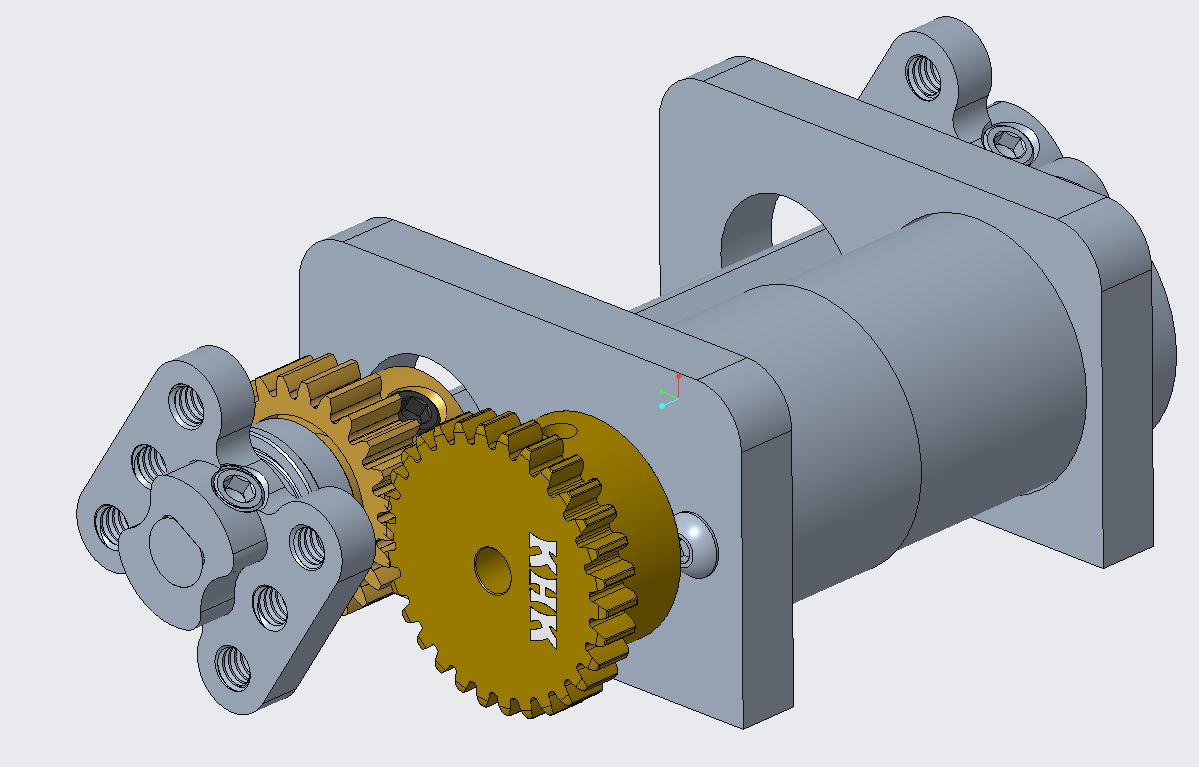
Interior geartrain which drives the cranks of the linkage arms
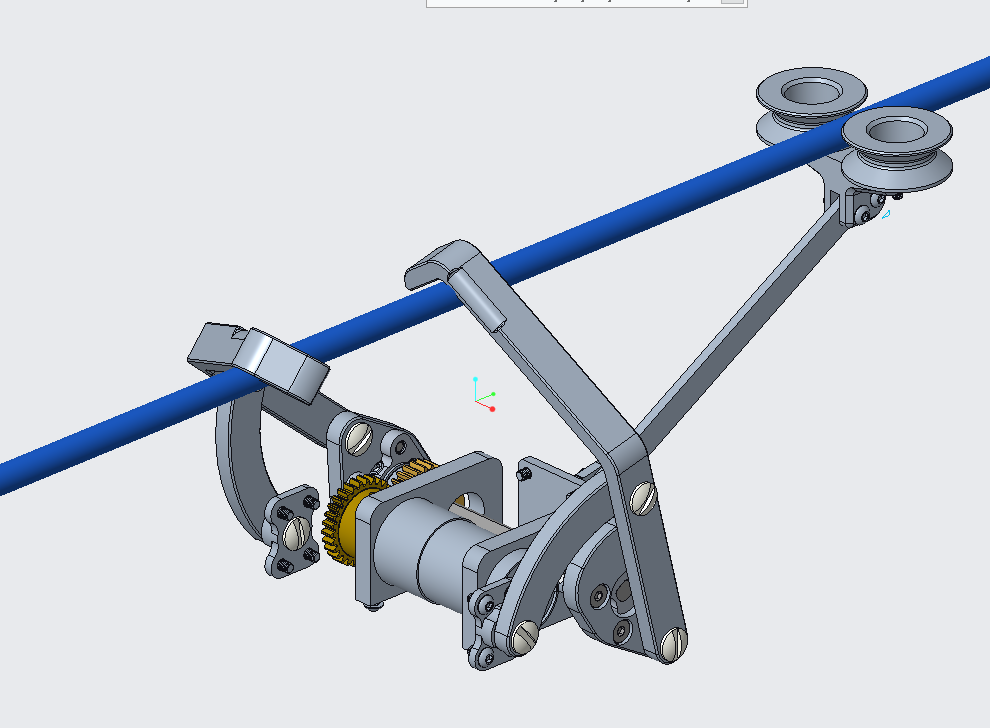
CAD model with the outer shell hidden
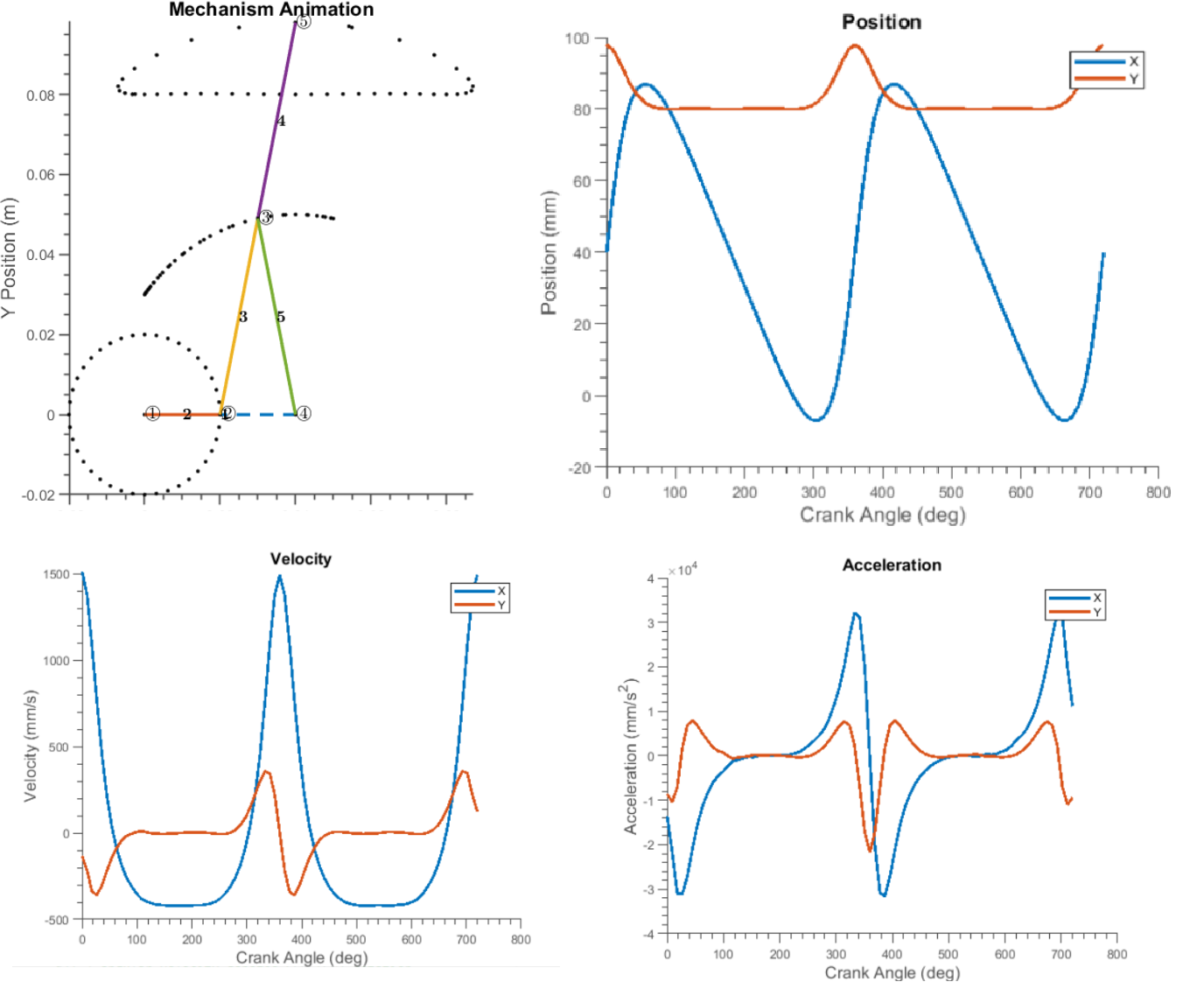
MATLAB Analysis plots for linkage kinematics